
| Added | Sun, 18/12/2016 |
| Источники |
To assess some of the parameters in the experiments, or when inspection of the scene in the early stages of the investigation of the fact sometimes you can use your smartphone or tablet computer. These devices are compact, widely distributed, and in some cases allow to estimate the necessary parameters with sufficient accuracy.
As with any other instrument, for maximum efficiency of application of modern mobile devices in the investigation and study of the NOF, and also to avoid erroneous conclusions from their testimony, must be clear about the principle and performance characteristics of the integrated sensors.
In this article we try to describe the principle of operation, functional limitations and possible applications of the most common sensors and functions of modern mobile devices. In addition, we present examples of the use of widespread programs based on readings of these sensors.
The sensors of modern mobile devices
Modern mobile devices (smartphones, tablet computers and also some media players and even cameras) perform a lot of functions other than those for which specifically designed. Thus, using a cell phone to take pictures and go online, using cameras to post images on social networks, etc. in addition, mobile devices are the most rapidly growing gaming platform. All this leads to the fact that the developers of mobile devices are constantly expanding the hardware capabilities of their products, adding to their components, the use of which is not immediately.
In one of the classes of these components are a variety of sensors, which are crammed with modern mobile devices. And if some of them (such as ambient light sensor or proximity) helps the device to perform its core functions, the capacity of some is revealed only when using special software.
Part of modern mobile devices may include the following sensors:
- accelerometer;
- gyroscope;
- the light sensor;
- proximity sensor;
- barometer;
- temperature sensors of the apparatus and the environment;
- measuring relative humidity;
- the sound sensor (microphone);
- camera;
- electronic compass;
- satellite navigation system (GPS/GLONASS);
- etc.
Many of these sensors can be used in surveys of places of incidents of unexplained facts, however, as mentioned above, for qualified use you need to understand the principle of their work, as well as restrictions imposed by the implementation of sensors in a mobile device, because all of these sensors are implemented in the form of extremely small and power efficient chips.
Consider the purpose and principle of operation of most interesting sensors.
Motion sensors (accelerometer, gyroscope)
As the name implies, an accelerometer designed to measure acceleration. In mobile devices, the accelerometer is mainly used to determine whether linear acceleration (for example, in cases when the device is falling or shaking). The gyroscope is used to determine angular acceleration, for example in cases when the device is turn off or turn over. These components of modern mobile devices have found many applications, especially in gaming applications.
The principle of operation of these components based on the application of microelectromechanical systems (MEMS). Detail to read about them in articles [1-3].
By far the most popular motion sensors, based on the condenser principle. The movable part of the system – classical weights on the hangers. In the presence of acceleration the weight is shifted relative to the fixed part of the accelerometer. The electrode of the capacitor attached to the weight, shifting relative to the plates on the fixed part. Capacity changes at constant charge, changing the voltage is a change you can measure and calculate the offset of the balance weights. Where, knowing his mass and suspension parameters, easy to find and the desired acceleration. [1]
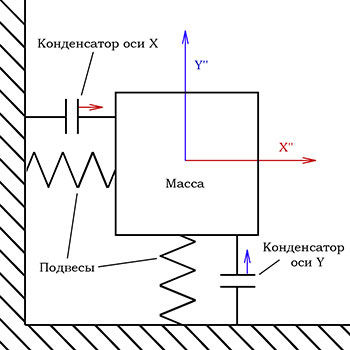
The basic principle of the capacitor accelerometers [1]
Often modern MEMS gyroscopes is arranged identical to the accelerometers. Just in them the values of the accelerations along the axes are recalculated into values of angles of rotation of the structure about the same, but the output another value. However, there are gyroscopes, the device which has been made specially for the rotation.
In addition to the capacitor sensor, there are MEMS accelerometers using different principles. For example, sensors based on the piezoelectric effect. Instead of the displacement of the capacitor plates, accelerometers of this type occurs the pressure of the weight on the piezoelectric crystal. The basic principle is the same as in piezosurgery under the influence of the deformation of the piezoelectric element produces a current. From values of voltage, knowing the system parameters, it is possible to find the force with which the weight presses on the crystal and, consequently, to calculate the desired acceleration.
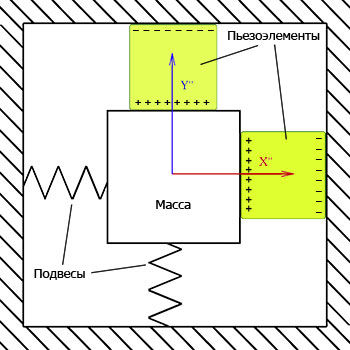
The basic principle of operation of accelerometers of the piezoelectric elements [2]
In detail the principle and embodiments of MEMS gyroscopes and accelerometers is described in [1].
Electronic level
There are programs that allow you to implement mobile device functionality such construction of the instrument as a plumb and level, based on data from the accelerometer and the gyroscope.

"Level" in the mobile device [4]
When using such software, you need to keep in mind that readings of sensors in this case are certainly less accurate than a real analog instrument. The sensors located in a mobile device designed primarily for tracking the rotation of the screen in games and other applications, while they are not required, the accuracy needed for the construction works. Thus, these sensors, in contrast to the real instruments not calibrated in the factory and the tolerances of their placement within the device may be too large to ensure acceptable precision.
For some models of mobile devices there is software that allows you to calibrate these sensors. The calibration process is carried out by positioning the device on a pre-leveled with real instruments surface. Software writes to the device memory sensor readings corresponding to zero deviation from the horizontal on each axis and these values are later used in the level calculation. This procedure allows to significantly improve the accuracy of the virtual instrument, but its action is short-lived and can be interrupted by various external influences, ranging from mechanical shock and ending with the finding in strong electromagnetic fields.
Microphones and pressure sensors
These components are also constructed on the basis of MEMS elements.
They are arranged – simply nowhere. A fundamentally important element in this microphone is it is a flexible facing membrane, and the thicker stationary plate. Under the influence of air pressure the membrane is displaced, changing the capacitance between the plates is at a constant charge voltage is changed. These data are converted to amplitude and frequency of the sound wave.
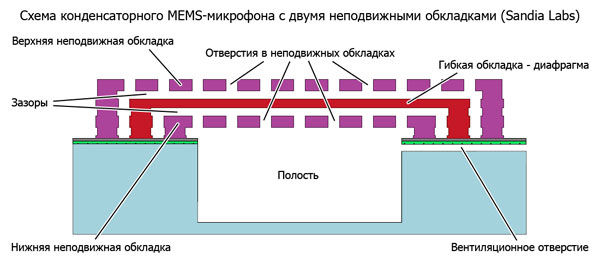
To minimize the effect of air pressure on a fixed surface, this surface is perforated. In addition, it is a relatively large niche with a mandatory vent. The idea that the only moving element in the system should ideally be membrane – and only it. As in the case of accelerometers, there can be used the piezoelectric effect – in this case beneath the membrane is a piezoelectric crystal. Then – as in the case of piezoaccelerometers: air pressure is transmitted by a membrane to the piezoelectric element, the influence of the crystal produces a current. The voltage is measured and translated into the amplitude and frequency of the sound.
What is good for sound and suitable for measuring pressure in other areas. Similar to microphones MEMS systems can be used as pressure sensors [1].
Sound level meter
Sensors that are essentially microphones on mobile devices, it is logical to use as a sound level meter – instruments designed to measure sound level. In fact, it is necessary to determine the dependence of the signal level at the output of the microphone of the amplitude of the acoustic vibrations of a membrane (let's call this the dependence of the transfer characteristic). However, this is not so easy, despite the fact that the appropriate software exists.
When trying to measure noise using your mobile device, we are faced with two problems. The first problem applies to all sensors located on mobile devices and is that they are not measuring devices. In relation to the microphones this means, first of all, a sufficiently large range of parameters affecting the transfer characteristic of the microphone. Simply put, even MICS of the same manufacturer installed in the device of the same model, when measuring the same noise level will give different results. It would be theoretically possible to calibrate microphones, but no one does.
The second problem is more specific in nature, and negates the possible benefits from the calibration of microphones. The fact that almost all modern mobile devices are used adaptive algorithms of noise suppression. These algorithms are designed to improve the quality of the transfer of the basic sound information is speech, and is based on increasing the ratio of useful signal to noise in derived from the microphone signal. Thus, the signal coming from the microphone, is exposed to complex nonlinear transformations as a result of digital processing, and the noise that attempts to measure a program realizing the sound level meter has little to do with the actual level on the microphone input. Theoretically, again, the algorithms of noise reduction can be turned off, however, given the large variety of mobile devices on the market, it is doubtful to assume that the authors of the software provided to disable these algorithms across all devices.
As a result of all the above we can conclude that the sound level meter in the mobile device can produce results, having absolutely no relation to the actual noise level, and rely on his testimony when conducting research it is impossible.
Audio spectrum analyzer
Spectrum analyzer is designed for displaying the distribution of the energy received audio signal (i.e. sound around smartphone).
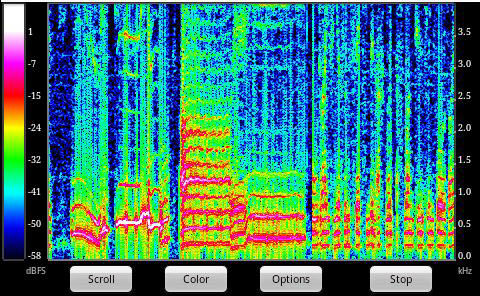
The result of spectral analysis of the audio signal [5]
The application of the spectrum analyzer allows to avoid problems with the variation of the transfer characteristics of the microphones, because the results of his work of the researcher is not interested in the absolute value of the signal level and its distribution in frequency. If it were not for the nonlinear distortion of the signal, the result of spectral analysis could be considered as an objective reflection of the surrounding mobile device acoustic pattern, even smasshtabirovannogo with an unknown factor. However, as mentioned above, the microphone signal is subjected to adaptive processing, distorted, with the result that the energy distribution of the frequencies changing. A standard telephone channel, intended for transmission of voice information takes the band from 300 to 3400 Hz, which allows to distinguish between the voice timbre and to limit interference and noise, increasing with the increase in the band [6]. Signal levels outside this band are reduced, as a priori it is believed that these signals are interference when talking.
Thus, an audio spectrum analyzer implemented in a mobile device, as well as a sound level meter that receives the input signal, not reflecting the real acoustic environment, and cannot be used for serious research.
The relative humidity sensor
One of the most modern elements, designed to measure relative humidity in mobile devices is the chip Si7005 production company Silicon Labs. [7]

Chip Si7005 [8]
To measure the relative humidity uses a polymer dielectric film with high dielectric constant formed on the crystal, and mixed signal processing, manufactured by CMOS process technology. Sensors are available in packages of type QFN 4 x 4 mm. the Dependence of the absolute error of measuring the relative humidity of the measured values is described by schedule:
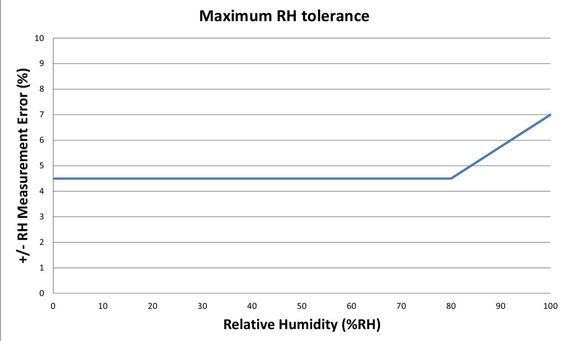
As can be seen from the graph, when measuring relative humidity, whose value is less than 80 %, the sensor provides a constant uncertainty level of ± 4.5 percent. When humidity increases above 80%, the error starts to grow linearly and reaches ± 7 % in absolute humidity.
In addition to moisture, this chip also provides temperature measurement with an accuracy of ± 0.5° C. [8]
Psychrometer
The described technology is in the segment of mobile devices is fairly new, and yet the author did not come across any device equipped with a humidity sensor. However, once such devices appear, there will be software that can read the readings of these sensors. Judging by the characteristics of the chip, it can provide acceptable for most research tasks accuracy. However, the measurements need to be considered that the sensor is directly on the chip, with the result that it will take some time from placing the device in the test environment to the moment when it will be possible to obtain adequate measurement results. The value of this delay may be clarified only experimentally for each specific device.
Electronic compass
Almost every modern mobile device has an embedded navigation system, one component of which is an electronic magnetic compass. Physically it is implemented as a chip, the principle of which is based on the Hall effect [9] – the phenomenon of a transverse potential difference (voltage) by placing a conductor with a constant current in a magnetic field. The magnitude of this voltage depends on the orientation of the conductor relative to the lines of magnetic induction of the magnetic field. Thus, by measuring the transverse voltage in a conductor created a magnetic field of the Earth can determine its position relative to the North, and hence the position of the mobile device.
It should be borne in mind that the accuracy and even performance of such a compass depends on many factors. The Earth's magnetic field is quite weak, so the sensitivity of the chip should be high. However, this leads to the fact that she, being placed inside the device, stuffed with other electronic components, it becomes exposed to a large amount of interference, reducing the measurement accuracy.
Furthermore, compass readings very greatly affected by close metal objects, including parts of the mobile device itself, distorting the shape of the magnetic field near the chip. Quite often (especially in inexpensive models of devices, the design of which has not been allocated a sufficient amount of engineering resources to develop the navigation system) is totally unusable compass, showing the random position of the device relative to the North.
The measurement accuracy of modern electronic compasses in mobile devices reaches units of degrees (on average 3-5). The maximum accuracy of readings they provide the horizontal location of the device. If you deviate from the horizontal by any one of the axis error determination of the North direction begins to increase, reaching its maximum at the location of the device perpendicular to the surface of the Earth.
Finally, another feature of such compasses is the ability to be magnetized. After a long stay in close proximity to a ferromagnet, especially magnetized, the compass begins to generate a direction value with a permanent error. In order to get rid of this effect, you need to "demagnetize" the compass (usually this procedure is performed when you restart the device), and then carry out its calibration as described by the manufacturer method.
Thus, it is possible to formulate recommendations to be followed when using an electronic magnetic compass:
- before you start to use to compare readings with the readings of the usual tourist compass to make sure its principled performance;
- before using compass demagnetize and calibrate it;
- when working the device is held parallel to the Ground surface;
- to avoid proximity to the device massive objects made of ferromagnetic materials (keyrings, etc.);
- considered a reliable compass readings taken in open areas (away from large metallic objects such as fences, gates, etc.).
Satellite navigation system GPS/GLONASS
Actually, do satellite navigation systems exist independently from mobile devices and represent a sufficiently large number of satellites located in geostationary orbits around the Earth. Each of these satellites emits a radio signal. In the mobile device is inserted into the receiver and antenna system for receiving radio signals from those satellites, as well as software that allows for these signals to calculate the current coordinates of the device.
At the moment there are only two functioning global navigation satellite system:
- GPS (Global Positioning System – global positioning system) – designed, implemented and operated by the U.S. Department of defense. Currently, there are 31 working companion. The typical accuracy of modern GPS receivers in the horizontal plane is approximately 6-8 meters with good visibility of satellites and the use of correction algorithms. In the U.S., Canada, Japan, China, the European Union and India are the stations for WAAS, EGNOS, MSAS, etc. transmit corrections to differential mode that allows to reduce the error to 1-2 meters on the territory of these countries. When using more complex differential modes, the positioning accuracy can be increased to 10 cm. Initially, GPS was developed as a purely military project. But after in 1983 intruded into the airspace of the Soviet Union the Korean Airlines plane with 269 passengers on Board was shot down due to disorientation of the crew in space, US President Ronald Reagan in order to prevent future similar tragedies allowed partial use of the navigation system for civilian purposes. In order to avoid the application of the system for military purposes, the accuracy was reduced by a special algorithm [10]
- GLONASS (global Navigation Satellite System) is a Soviet and Russian satellite navigation system, developed for the Ministry of defence. As of March 5, 2013 the only part of the system has 29 satellites, of which is fit for purpose 24. The stated positional accuracy of 3-6 m. [11]
In the process of design and build is the European satellite positioning system GALILEO, however, it is expected to be commissioned only in the years 2014-2016. [12]
The sole purpose of the global systems of satellite positioning is the determination of coordinates, speed and direction of movement of the subscriber device and receive a reference time signal. All other functions provided by modern mobile devices (navigation, trackers, search on the map, augmented reality, etc.) are the result of processing received from the navigation data and have no relationship to the actual it systems.
The positioning accuracy using satellite navigation systems is highly dependent on the number of satellites, signals which accepts user device. In addition, the accuracy strongly depends on the openness of the space, the height of used satellites above the horizon. In the polar regions the accuracy is greatly reduced. Thus the simultaneous use of both the navigation system already provides a substantial increase in accuracy. The European EGNOS project that uses the signals of the two systems gives a positioning accuracy in Europe at the level of 1.5-3 meters. [11]
The main disadvantage of satellite navigation systems is the need of the location of the mobile device within coverage area for radio signals sent by satellites. In closed spaces (not only in caves, often even in buildings several metres from the window) these signals are either absent completely, or the number of available satellites are insufficient to determine the coordinates of the device. The above precision is achieved only under the open sky.
In addition to satellite navigation systems, modern mobile devices provide other ways of determining their current position. Thus, the A-GPS allows to determine the coordinates of devices on the signals of the base stations of cellular systems [13].
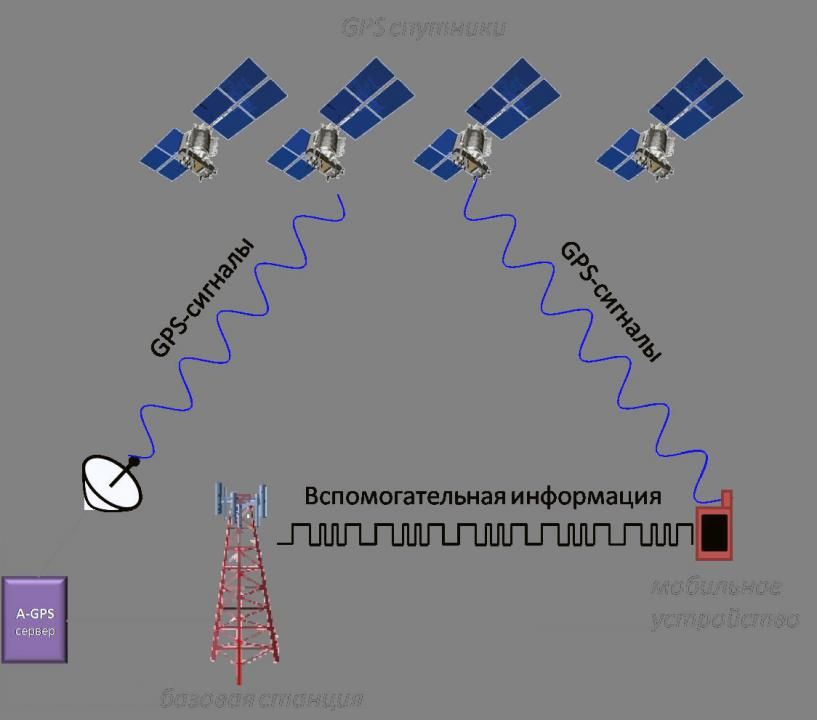
The principle of operation of A-GPS [13]
LBS technology (Location-based service) allows you to determine the device's location using information about available WiFi access points. The positioning accuracy with the use of these technologies is usually not less than 50 m, but the speed of the device is not defined at all. The main drawback of these methods is determined by the principle of their action: A-GPS, your device must be registered in the network and for the LBS you want to access through the Internet to the provider server of the corresponding service, which stores coordinate information of the base stations Wi-Fi.
In today's mobile devices are all possible technologies of determination of coordinates. Their joint use allows to instantly identify the location of the device in almost any conditions. The only difference is achieve the accuracy and completeness of the data that depend on many factors – the number of available signals of satellite systems, access to a cellular communication system, to the Internet. The accuracy of determining the current location of the device ranges from 50 to 1.5 m.
The positioning of the device
There can only repeat that the real accuracy of determination of own coordinates modern mobile devices is an average of 5-10 meters. Thus, it does not make sense to use them in tasks that require location tracking of anything within a radius of less than 100-150 m in this case the results of the experiment are extremely noisy random fluctuations of the navigation system.
It is also a way to attempt to determine the mobility of the object even when the stationary mobile device, the navigation system will issue coordinates with some scatter, as if the device moved within the zone, the size of which is determined by the accuracy of determining the coordinates in the current environment.
Stopwatch/timer
Mobile devices are also used to determine time intervals. Here we can say that the accuracy of time synchronization of devices is more than enough to identify the exact time and to estimate time intervals between events. It should be borne in mind that attempts to estimate the duration of intervals smaller than 1 second, will have large errors, but not because of the limitations of the mobile device and the inertial force of reaction of the one who conducts the experiment. Person is not physically able to perform the actions in such a short period of time, the delay between the event and the reaction of the person is many times greater than the error determined by the parameters of the device. To estimate such short intervals it is better to use the video of the event: it frame-by-frame analysis will allow to increase the accuracy.
The light sensor
This is one of the simplest sensors used in modern smartphones. The basis of these sensors are almost always semiconductor solar cells – electronic devices that convert the energy of photons into electrical energy. [15]
The voltage generated by the photocell is proportional to the illumination of the sensor. Thus, using such components can, for example, automatically adjust the screen brightness of the device depending on the external lighting. Actually, this is the most common variant of their use. Possible applications of these sensors in the investigation of NOF are small enough.
The proximity sensor
The proximity sensor is able to detect the presence of objects in close proximity to the device without physical contact. The proximity sensor creates an electromagnetic field or electromagnetic radiation (e.g., infrared), and monitors field changes or analyzes the reflected signal. With the help of the proximity sensor locks the touch screen to prevent accidental actions or taps on the screen during a call, for example, when the smartphone is close to your ear, and also reduces the load on the battery. [16]
In the same way as for the light sensor, the ability to use proximity sensor in the investigation of NOF is extremely small.
Temperature sensors
The principle of operation of temperature sensors built on the dependence of the resistance (conductivity) of the elements on their temperature: the higher the temperature of the conductor, the greater the resistance. Thus, measuring the resistance of the conductor pre-calibrated, it is possible to know its temperature. When the location of the conductor inside the device is measured internal temperature, near surface external.
Therometer
If the internal temperature of the device under study, the NOF does not matter, for evaluations of such sensors may well be used. However, you must keep in mind that the most accurate readings it is possible to obtain in the case when the sensor is immersed in the environment, the temperature which you want to measure. Thus, if the measured temperature, the device will show it quite accurately without further action. However, if you want to measure temperature of liquid, it will not be enough to bring the phone to its surface – it is necessary in the liquid to dip for some time that the temperature sensor is equal to the measured. You need to keep in mind that not every device will withstand such a treatment. However, even in this case, the temperature measurement error is unlikely to be less than 1-2 degrees, because, despite the characteristics of the sensor, it is not isolated, and its surrounding components generate heat, which distorts the measurement results. Moreover, it will be strongly manifest the dependence of the accuracy of the measured value – after all, the sensors in mobile devices are not measuring devices.
The camera
The camera is in almost all modern mobile devices. They found a large number of applications and are used both for photography and for video capture, video calls, etc.
The main element of any modern digital camera image sensor is designed to convert projected on it an optical image into an analog electrical signal or a stream of digital data (in the presence of ADC in the matrix).
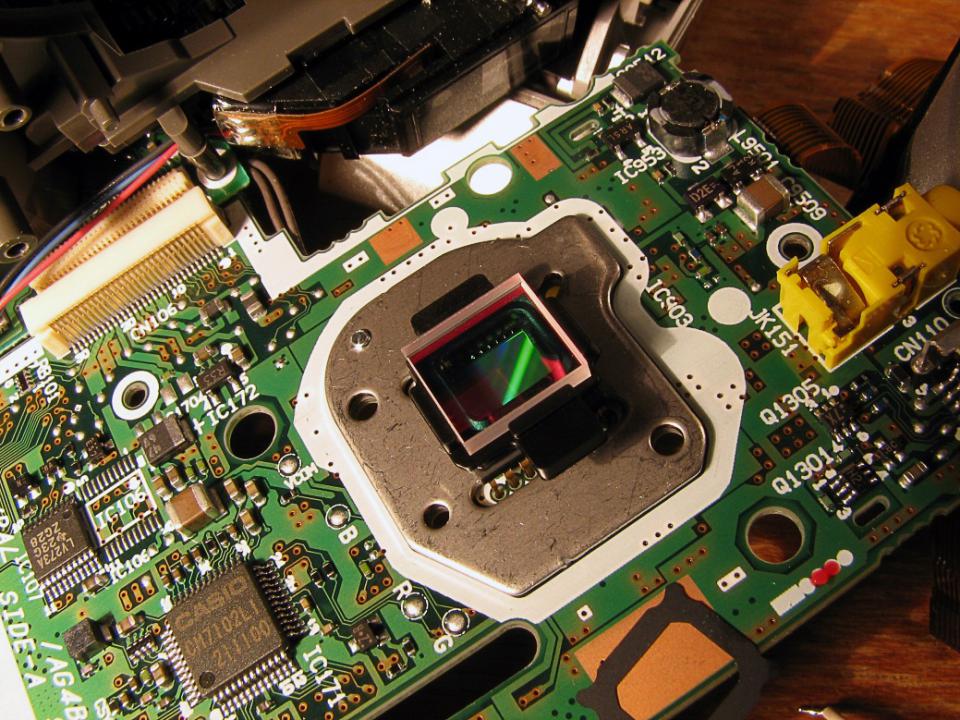
The matrix on the printed circuit Board of a digital camera [17]
In today's mobile devices use a matrix of three types [17]:
CCD-matrix (CCD) [18]. Consist of light-sensitive photodiodes made from silicon, use the technology of the CCD — charge coupled devices. CCDs were the first generation image sensor used in mobile devices. Currently in the process of their displacement CMOS-matrices.
A CMOS image sensor (CMOS) [19]. Made on the basis of CMOS technology. Each pixel is provided with sense amplifiers and sampled signal with a particular pixel occurs, as in the memory chips, randomly. SIMD WDR matrix is based on CMOS technology, has framed each pixel even and automatic system time settings of his scanner, which allows to radically increase the breadth of the photographic device. As of early 2012, devices such as CMOS took 92% of the market [20].
Live-MOS image sensor [21]. Created and applied by the company Panasonic. Made on the basis of MOS technology, however, contain a smaller number of connections for a single pixel feed on a lower voltage. Due to this and due to the simplified transfer registers and control signals it is possible to obtain a live image in the absence of the traditional to this mode of overheating and increase of noise level.
As can be seen, the vast majority of modern mobile devices uses a CMOS image sensor. This is due to their high efficiency and low cost of production. However, as often happens in such cases, several suffering the quality of the images: if the parameters of light sensitivity and structural noise advanced CMOS and CCD are virtually identical, the thermal noise in the mos matrices are slightly higher. In the result image obtained through a CMOS-matrix more noisy [19] (and if you apply automatic smoothing algorithms, the images are somewhat "blurry").
Such characteristics of the matrices, as the photosensitivity (sensitivity for short), the ratio of signal to noise and the physical size of a pixel uniquely interrelated (for matrices created with the same technology). The more the physical size of the pixel, the greater the resulting ratio of signal to noise at a given sensitivity or higher sensitivity at a given ratio of signal to noise. The physical size of the matrix and its solution is uniquely determined pixel size. The pixel size directly determines such important characteristics as photographic latitude.
This shows that the image obtained with the use of mobile devices, which is due to the severe shortage of space (with few exceptions) apply matrices in a very small footprint, almost never can be of quality comparable with images obtained using full cameras. For the most part, sufficient quality of images when shooting in daylight with moderate light. In all other cases (when there is insufficient lighting, excessive lighting, etc.) the matrix is not able to produce a high-quality signal and the mobile device tries to improve the quality of pictures with the help of algorithms of software processing. In this case, the image almost always made a strong enough distortion.
In addition, to increase the sensitivity of the matrix, the producers expand the range of wavelengths to which it responds. The vast majority of matrices of modern mobile devices sensitive in the middle infrared range. You can verify this by taking a photo of a normal TV remote when pressed on it the button. Thus, virtually all photos from mobile devices there is a part invisible to the human eye spectrum.
Rangefinder, etc.
There are a set of programs that allows to evaluate the distance to objects, their linear dimensions (height, length), area. All of these programs is based on the calculation of simple geometric proportions and use such components of modern mobile devices, such as camera and position sensors (accelerometer and gyroscope).
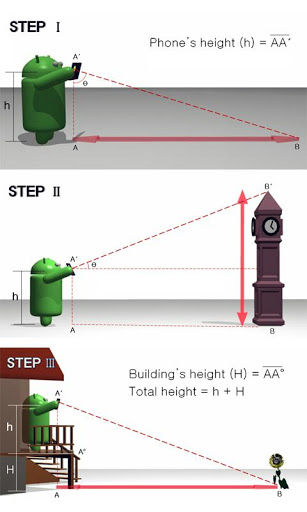
The principle of operation of the program SmartMeasure [22]
It must be borne in mind that such programs provide a sufficiently accurate result only in limited conditions of use: in cases when a person is on a level with the base of the measured object, between them there is no uneven terrain, etc. In all other cases (i.e. in real application) the measurement error is large enough.
Misconceptions
In addition to a really useful software, which can help in studies of NOF, there are some fun applications that mimic the operation of the device, but do not provide real information. As examples of the most common ones include the following:
- x-rays;
- imager;
- night vision camera;
- Geiger counter
- a metal detector.
In today's mobile devices are missing components that would allow these features to be implemented. Thus, the result of these virtual "devices" are simply simulated. So, x-ray, thermal and night vision camera are apps, which is the distortion of the images obtained by the camera using special digital filters. The results of such distortion are given below
Candle and white cloth with the option "x-ray"
Candle and white cloth with the option "Thermal"

Photo processing program "night vision Camera" [22]
But progress does not stand still. 18 Feb 2016 announced the world's first smartphone with a built-in imager [23].

The Bullitt company announced the world's first smartphone with a built-in imager. It is reported by Gizmodo.
Model S60 is a line of gadgets under the brand of Cat. Thermal imaging module for the device supplied by the company FLIR Systems, specializing in thermal systems.
The smartphone displays a thermal image on the screen in real time at a resolution of 640 by 480 pixels. To save the readings in the form of pictures and videos.
"Geiger counter" and "metal detector" and not just imitate the indications of the instruments based on them generated random data.
Conclusion
Modern mobile devices has absorbed almost all the achievements of modern technology, from microelectromechanical systems to satellite-based global positioning systems. These devices offer the researcher a rich Arsenal of tools that can help him in the work. However, it needs to be neat, clearly imagining the principles of each component and especially its use in specific conditions.
Before you begin using most of the described in this article functions, it is necessary to determine the adequacy of the sensors of the device, comparing them with the testimony of real devices. In some cases, may require additional steps for calibration of the sensors that will be able to significantly improve the accuracy of their testimony.
In one article it is impossible to describe the full range of features provided by modern mobile devices. Hundreds of them, and every day appear all new. The required set of each researcher is individually, depending on the knowledge, habits and needs, but each of the tools it needs to be sure at 100 %.
Translated by «Yandex.Translator»
Log in or register to post comments